Software GSP

De software
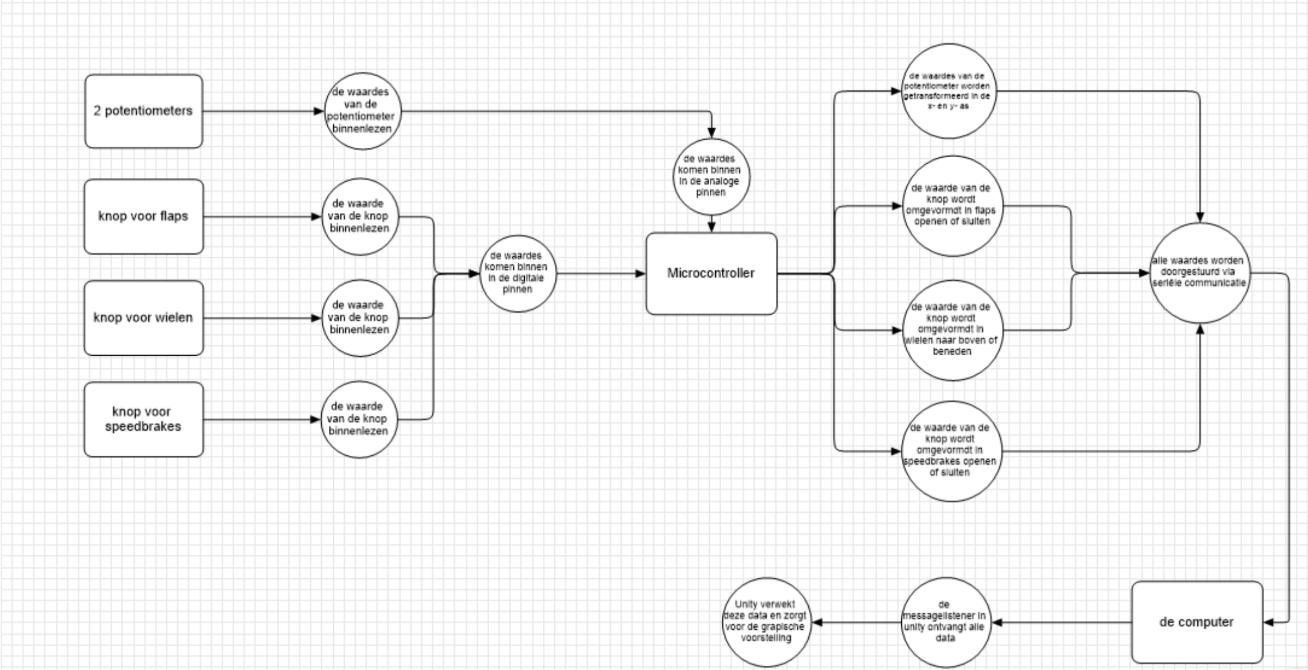
- hier onder staat de dataflowchart
- een beetje meer uitleg over de dataflow:
- Het begint bij mijn hardware waar 3 knoppen een digitaal signaal doorsturen naar de Adruino en waarbij 2 potentiometers een analoog signaal doorsturen naar de Arduino
- Als dit is gebeurt zal de arduino alle verschillende waarden van de knoppen en potentiometers beginnen verwerken in zinnen. (bv. als er op een knop gedrukt word wielen: up) en worden ze doorgestuurd naar mijn computer via seriële communicatie.
- Als dan de computer de verschillende zinnen binnenkrijgt zal de computer dit verder doorsturen naar unity waar een messageListener het bericht zal gebruiken om de waarden aan te passen van het vliegtuig zodat het kan vliegen.
- hieronder staat uitleg over de flowcharts van hoe mijn code in elkaar zit ook wel de software flowcharts genoemd.
Unity:
- FlightControls:
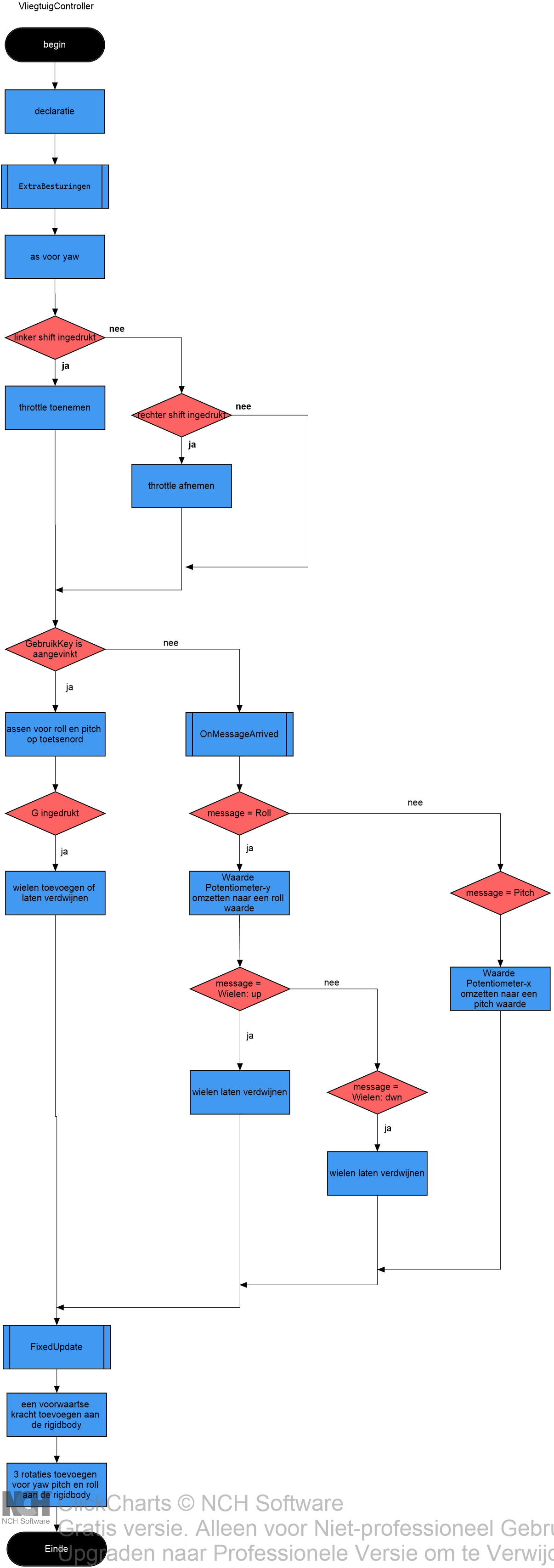
- Als eerst start ik met het declareren van alles wat ik nodig heb
- Als dat is gebeurt gaat hij naar de funcie ExtraBesturingen en kijken of er op Shift of Control wordt gedrukt om de throttle toe te nemen en waar hij gaat kijken om een zijwaartse vector toe te voegen om het vliegtuig zijwaards te laten ronddraaien.
- Daarna gaat mijn code eerst kijken of het vinkje van gebruik Key is aangevinkd. Als dit zo is gaat het eerst de input van mijn keyboard toevoegen en met vectoren het vliegtuig laten draaien en opstijgen.
- Als die knop niet is aangevinkt zal hij kijken welke waarden er binnenkomen in Unity via de Seriële communicatie van arduino om te bepalen hoe ver hij horizontaal en verticaal moet draaien en ook gaat hij kijken of de knop voor de wielen wordt ingedrukt.
- Ten slotte komt alles samen in de fixed update om de bewegingen toe te voegen aan het vliegtuig.
- CameraController:
- Dit begint wederom met een declaratie van verschillende waarden die essentiël zijn voor de beweging en de camera zelf.
- Daarna begint het met te kijken op welke knop je drukt en neemt het ook 1 POV als standaard camera.
- Dan wordt ook de snelheid van het vliegtuig bepaald en zaal met die waarden het vliegtuig meevolgen naar waar het ook gaat.
een flight simulator is niets zonder een flightstick en de code om de waarden te verwerken in Unity. Dus zal ik nu wat meer uitleg brengen over deze grote flowchart.
{kind=link}
In een flight simulator is het ook essentiël om een camera te hebben en het liefst met een paar "POVs" (point of view) om je vliegtuig van verschillende kanten te bewonderen
.png){kind=link}
Arduino IDE:
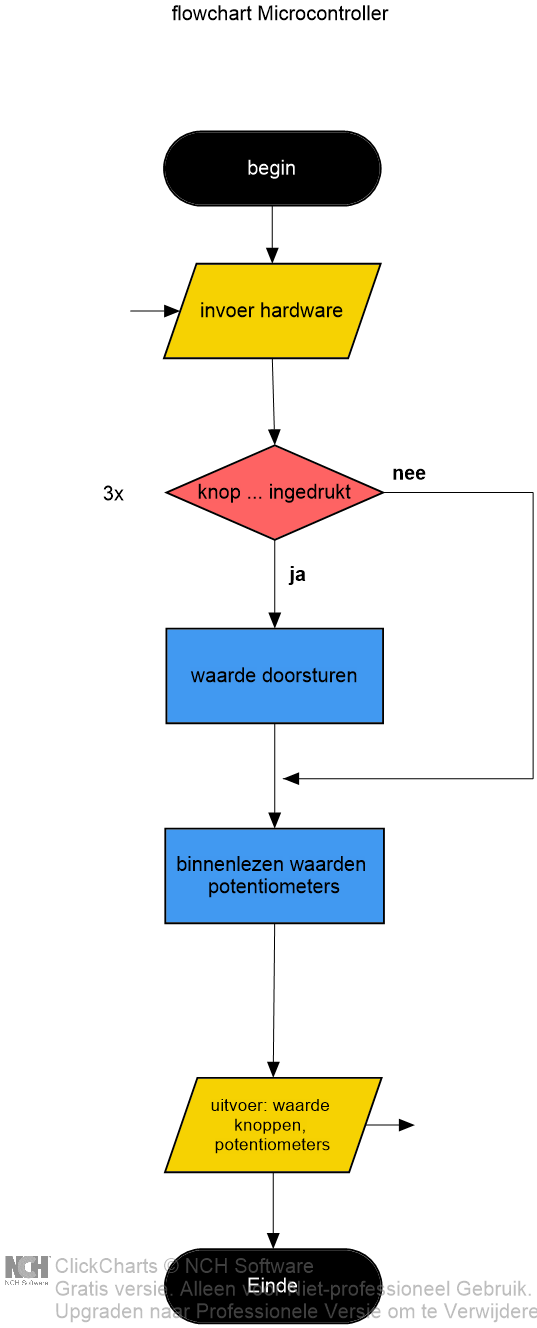
- MicroController:
- Als eerst komen alle waarden van de knoppen en de potentiometers binnen in de arduino.
- als dit is gebeurt zal hij eerst kijken of er 1 van de 3 knoppen is ingedrukt. als dat klopt zal de text a.d.h.v de ingedrukte knop een text doorsturen.
- ten slotte zal hij nog kijken welke waarde de 2 potentiometers hebben en deze ook mee doorsturen.
De arduino is misschien nog belangerijker dan alle andere code aangezien mijn eidwerk niet zou functioneren zonder dus zal ik nu de code van de hardware uitleggen
{kind=link}